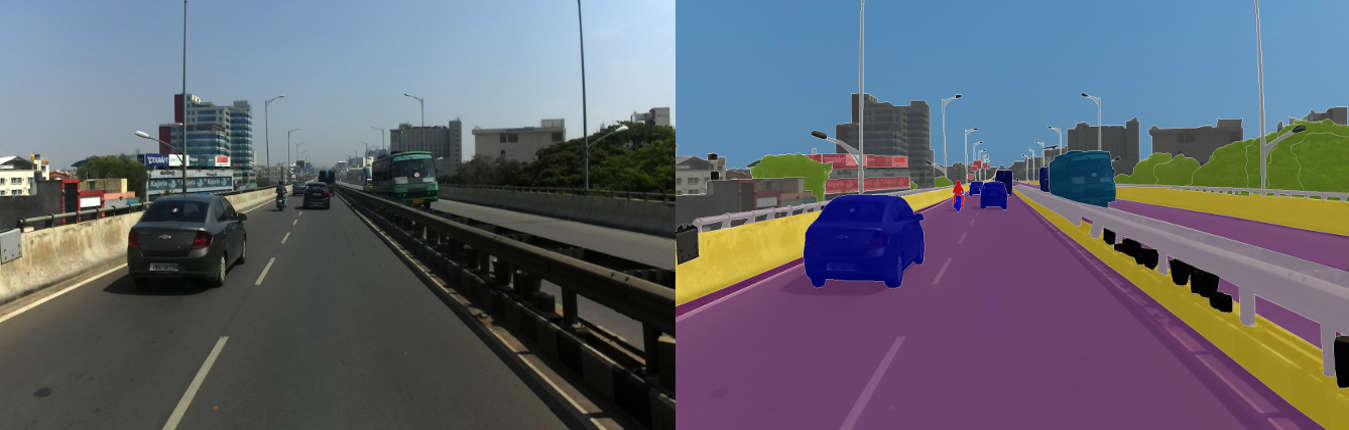
The segmentation benchmark involves pixel level predictions for all the 26 classes at level 3 of the label hierarchy (see Overview, for details of the level 3 ids).
The output format is a png image with the same resolution as the input image, where the value of every pixel is an integer in {1. .... , 27}, where the first 26 classes corresponds to the level3Ids (see Overview, for details of the level 3 ids) and the class 27 is used as a miscellaneous class.
We will be using the mean Intersection over Union metric. All the ground truth and predictions maps will be resized to 1080p (using nearest neighbor) and True positives (TP), False Negatives (FN) and False positives (FP) will be computed for each class (except 27) over the entire test split of the dataset. Intersection over Union (IoU) will be computed for each class by the formula TP/(TP+FN+FP) and the mean value is taken as the metric (commonly known as mIoU) for the segmentation challenge.
Additionally we will also be reporting the mIoU for level 2 and level 1 ids also at 1080p resolution in the leader board.
| Team/Uploader Name | Method Name | mIoU for L3 IDs at 1080p | mIoU for L2 IDs at 1080p | mIoU for L1 IDs at 1080p |
|---|---|---|---|---|
| Baseline* | DRN-D-38 [3] | 0.6656 | - | - |
| Baseline* | ERFNet [2] | 0.5541 | - | - |
| Mapillary Research (AutoNUE Challenge) | Inplace ABN | 0.7432 | 0.7789 | 0.8972 |
| BDAI (AutoNUE Challenge) | PSPNET+++ | 0.7412 | 0.7796 | 0.8992 |
| Vinda (AutoNUE Challenge) | Joint Channel-Spatial Attention... | 0.7407 | 0.78 | 0.8986 |
| Geelpen (AutoNUE Challenge) | Places365 model feature trained | 0.7376 | 0.7788 | 0.8954 |
| HUST_IALab (AutoNUE Challenge) | DenseScaleNetwork | 0.7339 | 0.7745 | 0.8955 |
| Appari Lalith | PSPNet IDD12_2 | 0.7215 | 0.7662 | 0.8926 |
| DeepScene (AutoNUE Challenge) | Easpp+DenseAspp | 0.7111 | 0.7584 | 0.8823 |
| Team7 (AutoNUE Challenge) | DRN-D-105 modified | 0.6794 | 0.738 | 0.8696 |
| MingdongYang_WHUT | DSMRSeg | 0.6444 | 0.7081 | 0.8428 |
| TeamTiger | Modified DLV3+ | 0.5892 | 0.6826 | 0.8346 |
| Shubham Innani | pdlv3 | 0.5791 | 0.6627 | 0.8077 |
| Anonymous | ana | 0.5642 | 0.6731 | 0.8012 |
| Anonymous | Anonymous | 0.4784 | 0.5704 | 0.6707 |
| Attention-Net | Attention U-net Based Segmentation | 0.3422 | 0.4716 | 0.6281 |
| Sabari nathan | Attention U-net | 0.3305 | 0.4419 | 0.6423 |
| Sabari nathan | Attention U-net Based Segmentation | 0.0187 | 0.1345 | 0.3423 |
* Baseline was run by the organizers using the code released by the authors (ERFNet [2] here: https://github.com/Eromera/erfnet_pytorch) and (DRN [3] here: https://github.com/fyu/drn)
In the instance segmentation benchmark, the model is expected to segment each instance of a class separately. Instance segments are only expected of "things" classes which are all level3Ids under living things and vehicles (ie. level3Ids 4-12).
The output format and metric is the same as Cityscape's instance segmentation [1].
The predictions should use "id" specified in : https://github.com/AutoNUE/public-code/blob/master/helpers/anue_labels.py , unlike the semantic segmentation challenge where level3Ids were used.
| Team/Uploader Name | Method Name | AP | AP 50% |
|---|---|---|---|
| TUTU (AutoNUE Challenge) | PANET | 0.3918 | 0.6753 |
| Anonymous | Anonymous | 0.2766 | 0.5001 |
| Poly (AutoNUE Challenge) | RESNET101 MASK RCNN | 0.2681 | 0.4991 |
| Dynamove_IITM (AutoNUE Challenge) | Mask RCNN | 0.1857 | 0.3873 |
| Katia Jodogne-del Litto | CenterPoly v2 | 0.174 | 0.4508 |
| PolyMTL(LITIV)&Genetec | CenterPoly | 0.1443 | 0.3691 |
| DV (AutoNUE Challenge) | Finetuned MaskRCNN | 0.1036 | 0.1998 |
| Anonymous | Anonymous | 0.0 | 0.0 |